|
作者:刘佳仑1, 2,杨帆3,李诗杰3,关宏旭4 1. 武汉理工大学 智能交通系统研究中心,湖北 武汉 430063 2. 国家水运安全工程技术研究中心,湖北 武汉 430063 3. 武汉理工大学 交通与物流工程学院,湖北 武汉 430063 4. 武汉理工大学 航运学院,湖北 武汉 430063 摘 要 : 近年来面向自主水面船舶的智能化技术研发与示范发展迅速,但整体水平仍处于初级阶段。2018年起国际海事组织海事安全委员会逐步明确了自主水面船舶(MASS)的概念及等级,发布了《自主水面船舶试航暂行指南》,逐步确定了国际自主水面船舶的研究方向,对世界智慧航运与智能船舶的发展具有重要的意义。 本文总结了自主水面船舶等级定义和试航导则,梳理了自主水面船舶测试验证评估技术研究现状,最后对虚实融合的自主水面船舶测试验证评估的内涵、方法体系及关键技术进行论述。 关键词:自主水面船舶;虚实融合;测试验证评估;MASS试航导则 『 引 言 』 自2012年起,国内外船舶工业和航运业对自主水面船舶的关注持续上升,国际主要船级社先后发布了相关规范和指导性文件。2017年6月,国际海事组织(International Maritime Organization,IMO)第98届海事安全委员会将自主水面船舶(Maritime Autonomous Surface Ships,MASS)正式列入议程,2018年4月,第99届海事安全委员会明确了发展自主水面船舶,并启动相关法规的梳理和修订工作。自此,自主水面船舶正式迈向世界舞台。 1『 自主水面船舶等级定义和试航导则 』 围绕船舶自主水平分级,各国积极参与研究并发布了各自的分级标准,主要包括英国劳氏船级社、挪威自主船舶论坛、丹麦海事局、英国海事自主系统规范工作组、法国船级社、比利时航道管理局以及国际海事组织[1]。 国际海事组织第100届海事安全委员会会议上,采用了丹麦海事局对船舶自主水平的分级标准[2],将自主水面船舶的自主程度分为配备自动系统和辅助决策的船舶、有船员在船的远程控制船舶、无船员在船的远程控制船舶和完全自主船舶4个等级,并强调自主水面船舶在航行期间可以一个或多个自主程度航行,如表 1 所示。 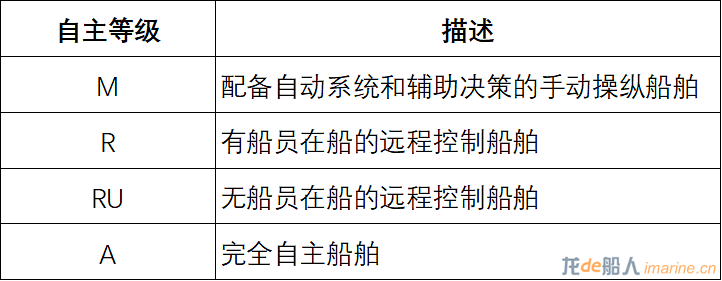 表1:国际海事组织船舶自主等级分级标准 2019年6月,IMO发布了《自主水面船舶试航暂行指南》,批准在满足“遵守相关强制性文件,采取适当的风险管理措施,明确试航范围与目标,向主管机关报告,选择具备适当资质的配员,提供保障安全试航的基础设施,确保通信、数据、信息实时共享与网络安全”等条件下可开展自主水面船舶试航实验。该指南明确了自主水面船舶的试航要求,以保障其试验的安全和效率。 2『 自主水面船舶测试验证评估技术研究现状 』 由于船舶的高风险与高附加值属性,除非自主水面船舶的可靠性和安全性能够得到完整的、系统的、彻底的测试、验证、评估和保障,否则无法将其投入到工业应用。传统船舶性能测试主要包括虚拟仿真和模型实验、实船实验三种方式。模型实验又可细分为水池实验和外场实验。通常在设计过程中利用传统虚拟仿真预测相关性能,在优选设计方案后开展模型实验评估其可行性以更新建造方案,最后通过船舶交付的试航实验对实船性能做定性判断与定量分析测试。 虚拟仿真成本低、零风险、可定制、可加速、可重复,但研发成本较高、准确性存疑、缺少真实反馈。传统的虚拟仿真测试技术主要是通过船舶驾驶模拟器仿真技术,利用虚拟现实技术营造虚拟的驾驶环境,通过操控模拟器与虚拟环境进行交互,从而进行船舶驾驶操作训练。康斯伯格公司和瓦锡兰公司在船舶模拟器领域具有深厚的技术与数据积累,为海事教育、培训和研究等方面提供了一系列技术支持。 2018年12月,罗·罗公司与Finferries在在芬兰帕尔加斯和瑙沃之间成功完成了渡轮Falco的按照设定航线的自主航行和远程驾驶试验。2019年9月,日本邮船公司(NYK)在“Iris Leader”号上对各海试项目进行了测试验证,并于2020年12月在东京湾内对400公里以外的拖轮进行了远程操控测试。2020年4月,韩国自主水面船舶项目开启,智能航行系统验证与确认技术是该项目的研究目标之一,旨在研究虚拟测试场构建、实海域测试以及系统性能测试评估并形成标准化体系。 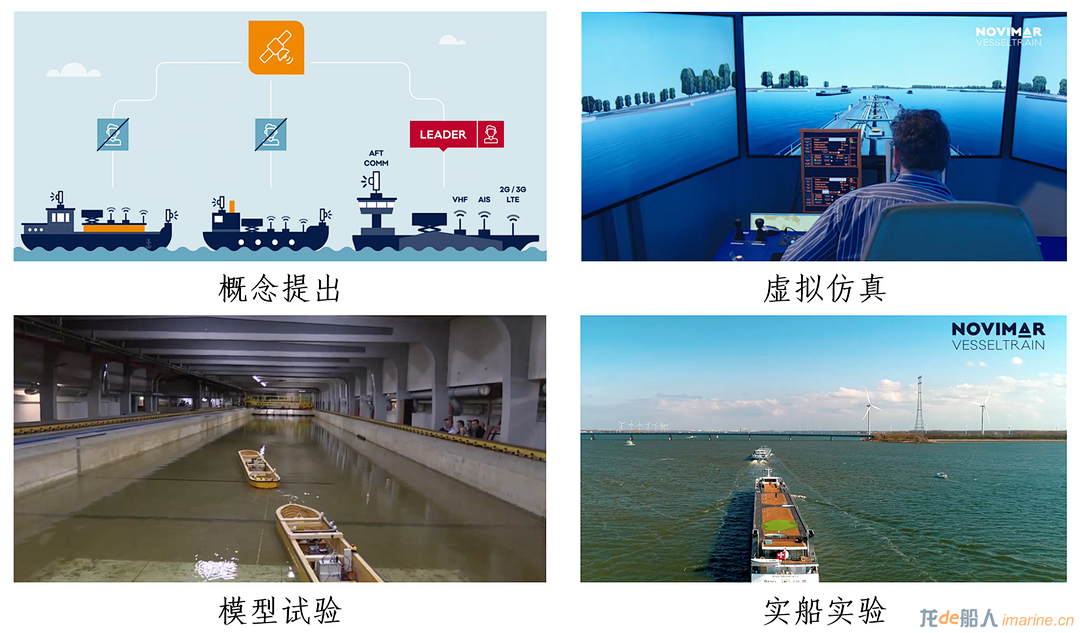 图1:NOVIMAR项目测试验证逻辑与方法 值得一提的是欧盟H2020的NOVIMAR项目,项目旨在研究船舶编队航行。如图 1 所示,该项目从编队航行概念的提出、虚拟仿真逻辑的设计,到模型试验的实现、实船验证的示范,形成了整个测试验证评估过程的模式化示范,对自主水面船舶相关能力的测试验证评估研究具有重要的借鉴价值。 3『 虚实融合的测试验证评估技术研究 』 中国船级社于2016年和2018年分别正式发布了《智能船舶规范》[3]和《自主货物运输船舶指南》[4],并于2020年3月1日更新了《智能船舶规范》,对智能船舶八大功能模块进行扩展与细化,明确了相关功能定义与技术要求。然而自主水面船舶测试验证评估仍面临一系列科学问题,包括安全问题、效率问题、成本问题、覆盖问题、真实问题以及应急问题,且虚拟仿真、模型试验、实船试验存在各自的优缺点,单一测试手段难以满足需求。 3.1 虚实融合测试验证评估的内涵 测试验证评估包含测试、验证和评估三个方面的内容:
在测试的功能层面,具体应包括航路规划测试、航速推荐测试、航向保持测试、航迹跟踪测试、避碰决策测试、网络通讯测试等;由功能层面进一步生成测试的任务层面,包括自主离泊、自主航行、路径规划、避碰控制、自主靠泊等一系列任务。基于功能与任务测试的结果,需要从方法层面去验证被测对象的功能达成与否,包括运动模型验证、规划算法验证、控制算法验证、航行区域适应性验证、控制对象适应性验证等。最终,面向船舶智能航行能力,应从系统综合性能层面去评价被测对象,包括算法准确性评价、功能切换性评价、航行经济性评价、控制镇定性评价以及系统容错性评价等。 3.2 虚实融合测试验证评估方法体系 虽然纯虚拟仿真测试可以在低成本、高效率、零风险的前提下对自主水面船舶航行理论与控制算法进行研发与测试,但在一定程度上存在真实性问题,包括测试场景的真实性、数据来源的真实性、船舶动力学仿真的真实性。模型测试和实船测试虽然可以真实的反应船舶的实际航行工况,但存在安全性、经济性、低效性、可重复性等诸多问题。因此,以虚实融合测试为主体,虚拟测试为先导,模型测试为中试,实船测试为校验的测试验证评估体系是自主水面船舶测试的必然选择。 虚实融合测试方法中的“实”指模型船/实船、实际航道环境及实际交通流信息;而“虚”指虚拟船舶、虚拟航道环境及虚拟航行场景[5]。利用数字孪生技术将模型船/实船姿态信息与状态信息离线或实时映射至虚拟船舶,同时构建基于真实航道环境信息与航行场景信息的虚拟仿真空间,在所构建模型船/实船的高精度船舶运动模型基础上,实现虚实融合的自主水面船舶测试验证评估。 3.3 虚实融合测试验证评估关键技术 虚实融合测试验证评估关键技术可以归纳为五项: 自主航行系统构建、多维数字孪生建模、多源异构数据融合、虚实融合信息交互以及人机共融评估评价。
4『 总 结 和 展 望 』 在新一轮科技革命和产业变革蓬勃兴起的背景下,为了响应船舶智能化发展需求,亟需进一步促进企业、高校、科研院所等机构与国际海事组织的紧密交流与深度合作。使用模型船或实船开展测试验证评估技术研究成本高、效率低、风险高,而纯虚拟仿真的真实性存疑。因此,虚实融合的自主水面船舶测试验证评估技术研究是迫切且必要的。 当前,在虚实融合测试体系的架构设计、试验方法、验证手段和评估标准等方面仍然需要开展大量的研究性与论证性工作,以支撑自主水面船舶系统、装备的研发、测试、定型及检验。 参考文献: [1]周翔宇,吴兆麟,王凤武,刘正江.自主船舶的定义及其自主水平的界定[J].交通运输工程学报,2019,19(06):149-162. [2]Authority Danish Maritime. Analysis of Regulatory Barriers to the Use of Autonomous Ships Final Report[J]. 2017. [3]中国船级社. 智能船舶规范[R]. 2020. [4]中国船级社, 自主货物运输船舶指南, 2018. [5]刘佳仑,杨帆,马枫,严新平.智能船舶航行功能测试验证的方法体系[J].中国舰船研究,2021,16(01):45-50. |

《国际造船公约规范标准动态》(2022年第3期)网络首发![详细]

《船舶建造技术分委会2022年度会议》顺利召开[详细]
日本实现零排放船舶路径之超高效LNG燃料船概念设计[详细]

《国际造船公约规范标准动态》2021年第1期发布[详细]
全浪向波浪增阻预报方法开发验证及建议[详细]

国际造船公约规范标准动态》(2021年第4期)网络首发![详细]

《国际造船公约规范标准动态》(2022年第1期)网络首发![详细]
自主水面船舶的虚实融合测试验证评估技术研究[详细]

2021中国参与国际海事事务十大值得关注新闻盘点[详细]

IMO海洋环境保护委员会第78次会议报告[详细]


