|
从载具推进的物理学角度来看,无人驾驶水下航行器(UUV)与滑雪艇或者油轮几乎没有什么不同。它采用了航行器-推进器-驱动的系统模型,该模型通过推进器将驱动能量转化为推力,以达到推动航行器移动的目的。推力平衡和运动的基本原理对这三种载具都是共同的,即旋转能量被系统的中心部件推进器转化为轴向推力。
不同类型载具的推进器设计所不同的是基于载具各自任务所特有的设计约束和目标。例如,一艘滑雪艇在拖曳速度下可能需要高推力,并愿意放弃潜在的最高速度以达到这一任务要求,它的传动比和推进器特性就是为此而设计的。为了获得最大的经济回报,油轮可能需要以“经济速度”获得最大的效率。或者,它可能还会额外限制排放或燃料消耗,这就要求在推进器的设计上做出妥协。
考虑到相关的各种任务,水下航行器有其自己的一套推进器设计要求,如电池寿命(或电池容量下运行的最大距离),最大直径,最小运行速度,从水动力效率或安全角度考虑是否采用导流管式螺旋桨,同时也考虑到可以减少噪声,确保安静地进行数据收集任务。这些设计要求是HydroComp公司进行UUV推进器设计工作时的思考,这些思考来源于一个成功的设计项目,是在和客户深度沟通设计需求和信息的过程中形成的。航行器-推进器-驱动模型是进行此类设计讨论的一个很好的框架。 航行器
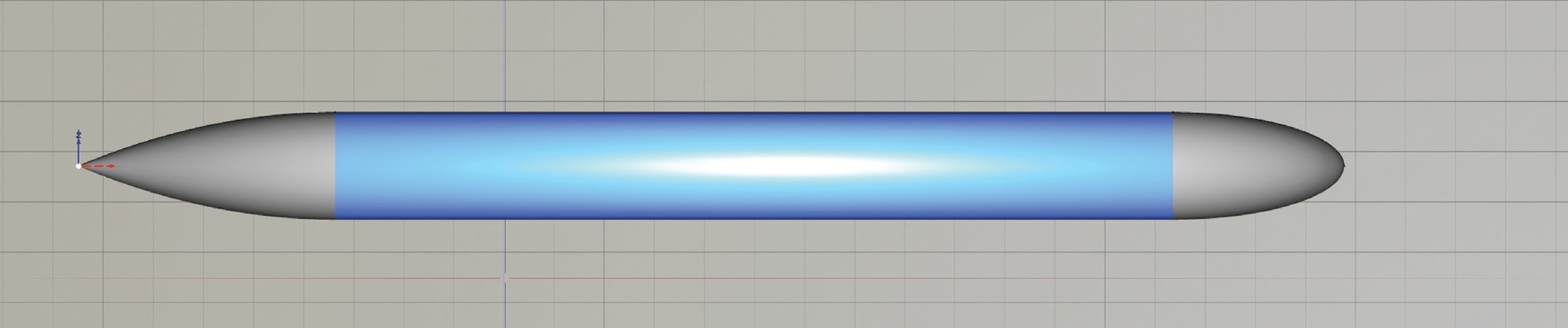
典型的UUV是一种回旋体外形(也称为轴对称形式),它有一个鼻子、身体和尾巴。为了装配设备的内部容积最大化,一些航行器的首部和尾部非常短。正如你可能预料到的,这样的首部必然会造成阻力的增加,由于流体进入推进器不是沿着轴向而是有一定的斜度,也会损失一定的推进性能。不同的阻力成分,如兴波阻力或压阻力和摩擦阻力或粘性阻力之间的平衡是我们工作的一部分,往往希望得到最小的阻力体积比,事实上,这并不能完全实现。我们真正想要的是最小的功率体积比,而尾部的几何形状会很大程度上影响推进器将回旋能量转换为有效轴向推力的能力。
因此,许多推进器设计项目首先会使用NavCad®软件预测航行器的阻力和船体-推进系数(伴流分数和推力减额),NavCad®软件是一款用于水动力和推进系统仿真分析的专业软件。
一个特有的潜水器模块为鱼雷型UUV提供了强大的预报分析能力 驱动
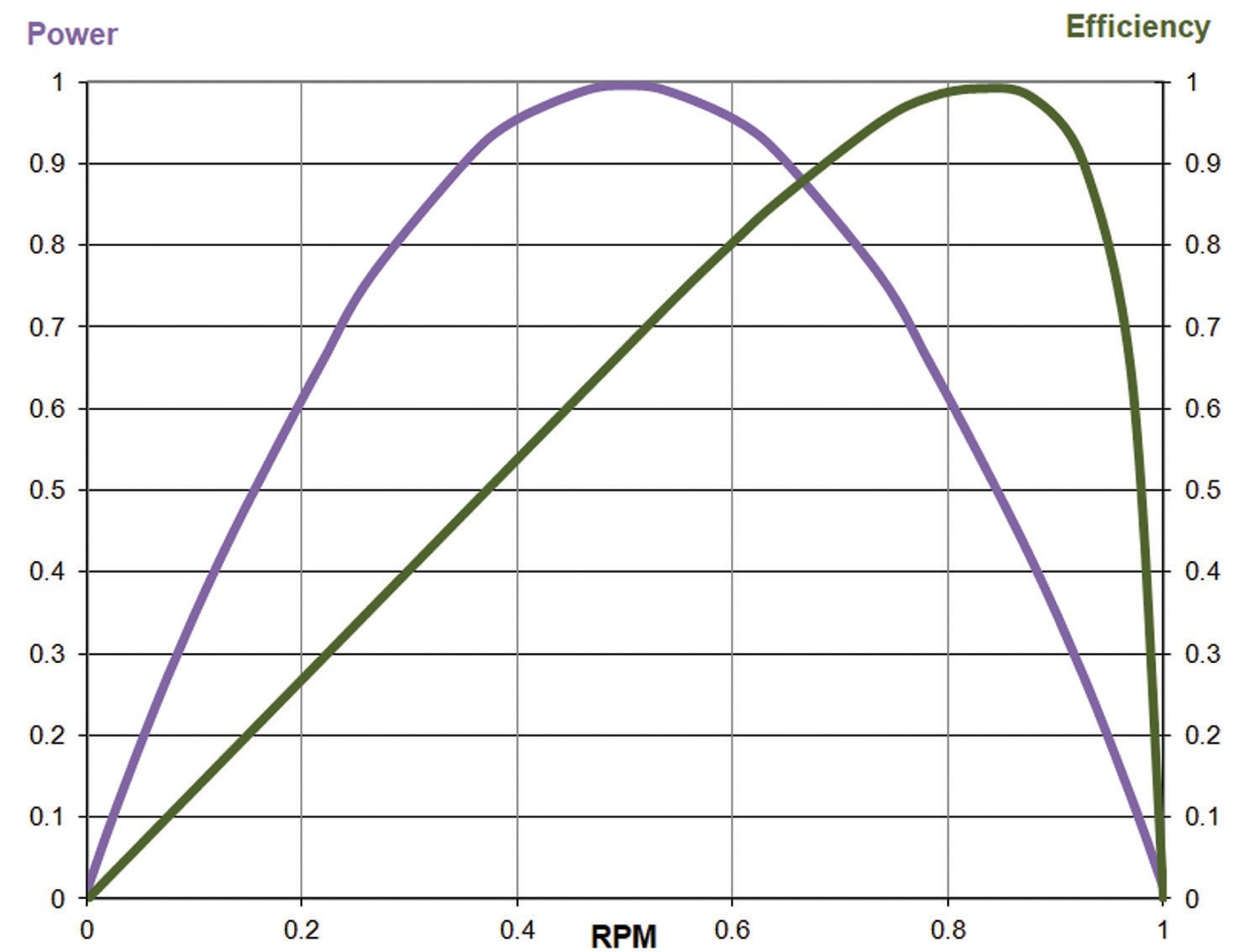
和推进器相对应的是驱动装置,通常是一个电动机。电机的电气特性各不相同,但推进器设计的关键数据是转轴上的机械输出功率和转速的关系曲线。输入电能功率的峰值很重要,当然,也就对应一定的运行限制。我们用电机效率曲线来描述输入电能功率,这有助于回答以下问题:如果最长的电池寿命是最高优先级,我们的最佳目标转速范围是什么?另一方面,转轴的功率和转速的关系曲线会告诉我们可能的最大功率所对应的转速,以及扩展开来,能够得到潜在的最大推进器推力和航行器速度所对应的转速。
从典型的电机转轴功率,电机效率与转速的关系曲线可以看出,可能的最高功率很少(如果有的话)出现在最高的电机输入效率处。因此,我们经常必须在提供更高的输出功率和提供最佳的电机效率之间折中定义设计转速点。
与每个关于电机驱动的UUV的讨论相关的是,轴转速几乎总是过高,不利于推进器的最佳运行。常见的情况是看到某种形式的传动装置,以实现最佳的推进器性能或者接受推进器可能以平庸的效率运行。
推进器 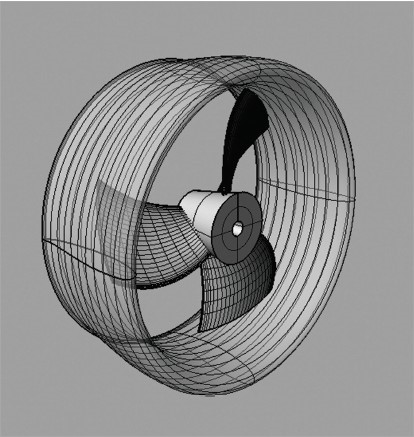 你会注意到这里使用的术语是“推进器”而不是“螺旋桨”。这是为了强化导管和螺旋桨(在大多数UUV上发现)是一个交互式单元,即推进器的概念。推进器的设计是寻找最佳的螺旋桨和导管的组合,同时跟踪它们的相互作用。换句话说,您必须使用具有此交互分析的设计工具,例如用于系统模拟的NavCad或用于螺旋桨-导管组件设计的PropElements®。在所有的UUV推进器设计项目中,一个普遍的目标是开发一种能够产生最高推力功率比(效率)的几何形状,这是我们通过大量得到验证的试验来实现的。通常外部设计驱动因素的影响会使成功的UUV推进器设计充满挑战性。例如,转速可能太高(如上所述),几何约束可能限制最大直径,或者它们可能会因为考虑载具尾部的斜率而影响设计。
花点时间提一下UUV推进器制造的意义重大。 媒体对于螺旋桨的3D打印进行了大量讨论。虽然从经济性和产能的角度来看这可能是有吸引力的,但我们必须注意,性能不会因表面纹理不适当(这对大多数UUV上的小尺寸的推进器有巨大影响)、疲劳强度失效或叶片中的液压弹性弯曲而受到影响。HydroComp公司通过各种内部研究项目,成功地将3D打印应用于小型推进器。
除了这些实际设计考虑之外,还有一个最有趣的当代设计驱动因素是辐射噪音。作为更广泛的可持续发展计划的一部分,HydroComp公司在推进器水声学(捕捉噪声和振动方面)具有成熟的专业知识。随着我们的工具开发出新的水声特性,这些知识也可供其他造船设计师和工程师使用。项目对噪声的敏感度始终是我们UUV推进设计工程客户讨论的一部分。
所有的水声激发都来自质量波动(流体质量的周期性运动)。推进器驱动的水声通常由螺旋桨在低压区中的振动引起,因为它在“遮蔽”区域(例如在支柱或控制鳍的后面)转进和转出。该波动的一部分仅仅是由于流入量变化引起的叶片周围流动方向的变化,这种流向的变化更重要的是由于叶片空泡的快速扩张和破裂所导致。每一个影响因素的评估都是我们推进器设计工作的一部分,根据需要通过改变叶片的轮廓和其外倾角分布来减轻影响。
过度的水声激发和传输也可以借助于一个创造性的导管设计。利用我们在导管性能模拟上的经验背景,我们可以考虑到特定的噪声抑制导管的几何形状是否能够提供必要的抑制,以及可能会带来的推进效率的任何损失。
因此,虽然UUV推进器设计有其独特的挑战,但它仍然只是一个更大的系统问题中的子任务。它能够提供令人有成就感的工程挑战,只需要多一点细心,加上合适的软件工具和实际经验就能成功完成。
| 





 发表于 2019-3-4 16:15
发表于 2019-3-4 16:15
 提升卡
提升卡 变色卡
变色卡